
安装调试:安装PCI接口的运动控制器,在WINDOWS中没有提示找到新设备(通讯异常)。
原因:
1. 板卡驱动是否正确安装。
2.计算机主板兼容性差。
3.PC机PCI插槽与运动控制器PCI金手指接触不良。
4运动控制器未安装到位。
解决方案:
1.请检查板卡驱动是否正确安装,在WINDOWS的设备管理器(可参看WINDOWS帮助文件)中查看驱动程序安装是否正常。如果发现有相关的黄色感叹号标志,说明安装不正确,需要按照软件部分安装指引,重 新安装;
2 更换PC机。
3更换PCI插槽,检查插槽内金属弹片是否整齐、干净;控制器金手指用防静电物品擦拭干净。
4 控制器PCI金手指要插到底,要注意机箱挡板不能过高挡住运动控制器,否则要更换机箱。
硬件接线:控制卡脉冲控制模式单端输出如何接线?差分输出如何接线?
单端输出:脉冲控制模式分为两种,即“脉冲+方向”和“CCW/CW”模式,两种模式的单端接法是一样的,只需要将控制器端的pluse+/dir+/5V和驱动器端的pluse+/dir+/5V相连接即可。
注意:若驱动器端的5V电压不是有控制器端提供,而是有外部开关电源提供的,此时仍需要采用此种接线方法(CCW/CW模式),则需要将控制器的5V电和外部供电电源模块的5V电短接,即将5V共起来。
双端输出(差分输出):脉冲控制的两种模式,即“脉冲+方向”和“CCW/CW”模式,两种模式的双端接法也是一样的,需要将控制器端的pluse+、pluse- /dir+、dir-、GND和驱动器端的pluse+、pluse- dir+、dir-、GND连接即可。
注意:控制器输出模式采用差分接线方法,采用双绞线的形式,相比单端接线方法,能够增强抗干扰能力。单端接线时抗干扰的能力较弱。详情可参看控制卡用户手册。
硬件接线:接步进电机,无法运动。
原因:
步进电机接线或者接收电平不对。
解决方法:
1. 可以用motion演示软件进行测试,观察脉冲计数等是否正常;
2 确认步进电机是否是接受5VTTL的方波脉冲信号;
3.是否已经接上供给脉冲和方向的外部电源,检查电机是否自锁,确保驱动器工作正常,没有出现报警。
4.步进分差分接法,单端共阳,及单端共阴接法可参考用户手册。
硬件接线:运动控制器以步进模式(输出脉冲)控制电机,有一个方向运动正常,另一个方向不动(限位未触发,负载无影响)。
原因:
运动控制器脉冲输出和驱动器接收方式不匹配。运动控制器输出方式:正脉冲+负脉冲(CW+CCW),驱动器接收方式:脉冲+方向(PULSE+DIR)
解决方案:
修改运动控制器或驱动器参数使控制器脉冲输出和驱动器接收方式匹配。
硬件接线:电机可以转动,但工作不正常。
原因:
接线错误或干扰
解决方法:
1.检查控制卡和驱动器是否正确接地,抗干扰措施是否做好;脉冲和方向信号输出端光电隔离电路中使用的限流电阻过大,工作电流偏小;
3.步进电机线圈串联或并联的接线不正确。
硬件接线:控制卡接某些步进电机使能信号无效。
原因:
有些步进电机使能信号接收5V,控制卡端的使能信号是24V。
解决方法:
用控制卡的5V输出来做使能信号,上电自使能,或者用24V的使能端口回路来控制,但要在该24V回路里串接电阻降压。
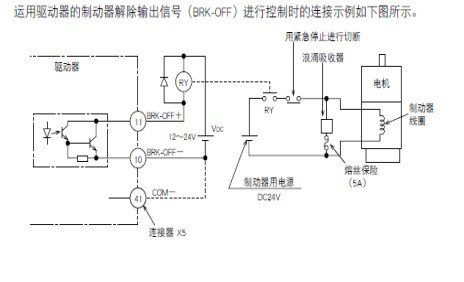
硬件接线:抱闸电机的应用,经常导致线路干扰。
原因:
抱闸线圈是感性负载,在通断电的瞬间会产生较大的感应电动势,影响到电路。
解决方法:
1 给抱闸线圈独立供电;
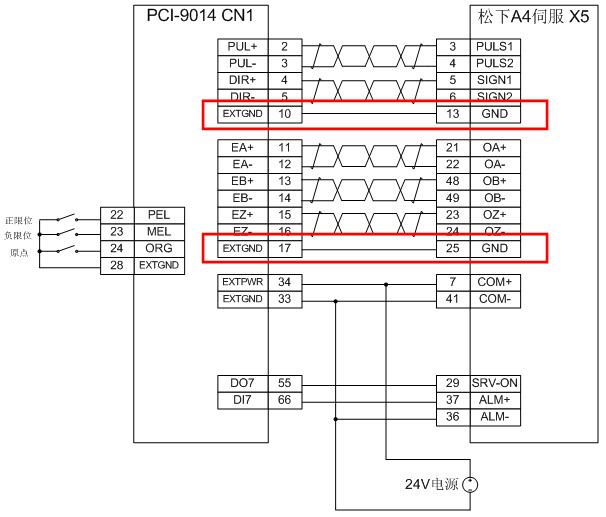
2 以松下为例:
硬件接线:限位或者home这类光电开关的电平变化检测不到。
原因:
光电开关类型不对或者IO坏掉。
解决方法:
1 查看光电开关类型是否是NPN型,部分控制卡只支持NPN型输入;
2 用输出短接到输入口或者用24V的负端短接输入口,用Demo查看输入指示是否有变化。
硬件接线:某个IO信号无法检测,或者端子板控制不正常。
原因:
68pin与端子板直接连接线,连接不好导致;端子排COM未供电;
解决方法:
1 检查68pin线;
2 检查接头有没有插紧;
3 检查接口插针有没有插弯或短路。
4.检查COM端是否接线。
硬件接线:运动控制器连接的驱动器没有报警信号输出(步进电机驱动器一般无报警信号),轴总处于报警状态,无法使能。
原因:
运动控制器轴报警功能是重要的保护功能,电路决定端口悬空时为报警状态。
解决方案:
1 调用函数(函数使用说明见编程手册),取消报警功能;
2 将对应轴报警端口与外部地短路(25pin轴端口的pin2与pin1)同时端子板必须接通24V直流电源,这样可使端口处于不报警状态;
3控制卡可在配置文件中把报警输入状态取反。
安装调试:编码器异常
原因:
编码器接线不正确;编码器供电;函数调用
解决方法:
1 请检查编码器信号类型是否是脉冲TTL方波;
2. 查看所选编码器说明书,检查接线是否正确;编码器供电是否正常;
3. 检查全部编码器及触发信号的接线;做好信号线的接地屏蔽。
4. 检查函数调用是否正确。
安装调试:运动控制器以步进模式(输出脉冲)控制伺服电机,伺服使能后立刻运动,电机运动不到位。
原因:
伺服驱动器接收到伺服使能信号到伺服电机使能准备好运动,有一小段延迟时间。伺服驱动器在未准备好的时间内不接收脉冲信号,因此如果控制器在伺服使能后立刻发脉冲,会丢失部分脉冲。
解决方案:
控制器执行伺服使能指令后延时一段时间再发脉冲,建议100毫秒以上。
安装调试:能够控制电机,但电机出现振荡或是过冲。
原因:
参数设置不当
解决方法:
1可能是驱动器参数设置不当,检查驱动器参数设置;
2应用软件中加减速时间和运动速度设置不合理。
安装调试:能够控制电机,但工作时回原点定位不准。
原因:
信号异常
解决方法:
1 检查屏蔽线是否接地;
2 原点信号开关是否工作正常;
3 所有编码器信号和原点信号是否受到干扰。
安装调试:运动时限位信号不起作用。
原因:
信号异常或程序紊乱
解决方法:
1限位传感器工作不正常,限位传感器信号受干扰;
2应用程序紊乱;可通过demo观察限位信号变化。
安装调试:驱动器和运动控制器都安装了限位开关,电机运动当驱动器限位开先于运动控制器触发时系统的坐标会发生错乱(运动不到位)。
原因:
驱动器的限位先于控制器限位触发时,电机不运动,但控制器没有感知驱动器的限位已触发所以还在发脉冲给驱动器,造成规范位置和实际位置不一致
解决方案:
1 可以改变两个限位的触发时序,把两个限位的位置错开,把控制器的限位放在前;
2 建议只使用控制卡的限位接线,控制器具有软限位功能,可启用。
安装调试:运动控制器以步进模式(输出脉冲)控制电机,连续往复运动,位置渐渐向一个方向偏移。发现在一个往复运动后,有时会偏移一个脉冲。
原因:
运动控制器脉冲输出计数沿和驱动器脉冲接收计数沿不匹配。在换向时可能有一个沿另一方向计数。
解决方案:
修改驱动器参数接收脉冲极性。
安装调试:控制卡发10000个脉冲,电机反馈没有10000(运动不到位)。
原因:
电机驱动器那边有电子齿轮比设置。
解决方法:
设置驱动器电子齿轮比为1:1关系,即接受a脉冲数为一圈,然后一圈反馈给上位机也是a个脉冲。
安装调试:运动控制器以步进模式(输出脉冲)控制松下伺服电机,高速运动常常少走距离,低速运动正确(运动不到位)。
原因:
高速运动时运动控制器发出的脉冲频率太高,超过了伺服电机驱动器接收脉冲频率极限,驱动器容易丢失脉冲。例如:松下伺服驱动器接收脉冲频率500KHZ,超过500KHZ频率脉冲不能稳定接收。
解决方案:
1 注意运动速度,计算最大速度时的脉冲频率,不能超过伺服电机驱动器接收脉冲极限。必要时可以通过设置伺服电机驱动器参数,减少电机旋转一周对应脉冲数。
2 改变接线口到高频脉冲接收口。如松下驱动器高频接收口可达到4MHz。
编程应用:控制卡当速度设置较大Vel超过2000时,运动完成时,规划位置和目标位置不一致,或者电机运动已经异常,加速度或发的脉冲较少时却正常。
原因:
1.所发的脉冲频率已超过了驱动器接受脉冲的最大频率,导致丢失指令脉冲,而加速度较小时,速度没有加速到最大速度时脉冲已发完,故正常。
解决方法:
更改系统的脉冲当量值或改用高频脉冲接收的驱动器。
编程应用:使用点动Jog+/Jog-松开后脉冲一直发,停不下来的情况。使用自己编的软件或Demo都会出现。
原因:
通过一个CButton类实现,该类具有ButtonDown/ButtonUp、贴图等功能,非常易于使用,但此类有可能响应不过来。
解决方法:
建议修改响应机制,使用消息响应的机制来实现此功能,不再使用Cbutton类实现。
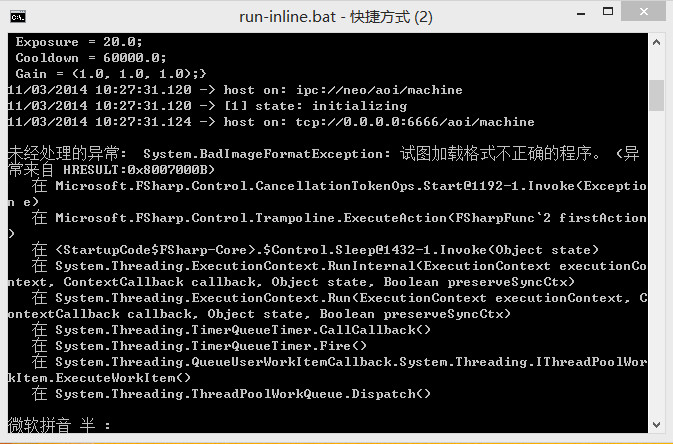
编程应用:使用Visual Studio编写运动控制程序,在编译时出现“试图加载不正确的程序”的错误。
原因:
1 使用的dll为32位系统编译,而此时选择的VS编译平台为64位;
2 使用的dll为64位系统编译,而此时选择的VS编译平台为32位。
解决方法:
编译什么样的平台就要加载什么样的DLL。
编程应用:在32位系统上编好的程序,64位系统上无法运行。
原因:
控制卡驱动及库函数文件都有分32位及64位。
解决方法:
在64位系统上要更换64位的驱动,如果客户要编辑32位的应用程序,则用32位的库函数,配置32位(X86)的软件编译环境,如果客户要编辑64位的应用程序,则用64位的库函数,配置64位(X64)的软件编译环境。
编程应用:写回零程序时,回零完成后zeropos,编码器仍然有数值。
原因:
编码器寄存器数值是直接由电机编码器那边传输过来,有数值说明电机还没停稳。
解决方法:
在规划到位之后需要加足够的延时来等待电机到位停稳,然后再zeropos,注意查看返回值。
编程应用:基于WINODWS平台开发的运动控制器应用软件,使用了多线程执行运动控制器函数,经常发生函数执行出错情况(函数返回值-1)。
原因:
运动控制器函数库资源多线程访问冲突,在多线程调用函数时会产生错误。
解决方案:
可以使用互斥条件避免同时有多个调用运动控制器函数的线程程序段执行。例:如果在定时器程序中调用运动控制器函数,则在主程序中调用运动控制器函数前关闭定时器,调用完成后开启定时器。
1初始化失败或开启测试程序异常
运行程序后弹出提示框“XX Initial fail”,表示卡初始化失败
1.1硬件驱动安装
首先确定计算机管理中硬件驱动是否有安装好
1、确定板卡金手指洁净(用橡皮擦清洁金手指),并将卡安装在电脑插槽里,
2、更新板卡驱动,请参考说明书中安装驱动的方法进行安装。
3、重新插拔卡,更新板卡驱动
4、换PCI槽测试,换卡测试,换电脑测试
5、如果做完上述尝试,仍然认不到卡的话,请联系业务,将卡发回公司处理。
1.2管理员权限
如果开启程序出现卡号或者轴号是非常大的一个数,请考虑是否有获取管理员权限
在使用win7及以上版本的系统时,直接运行.exe可执行程序时,需要鼠标右键点击程序,并选择“以管理员身份运行”,或者用其他方法获得管理员权限后,运行程序的结果才是正常的。
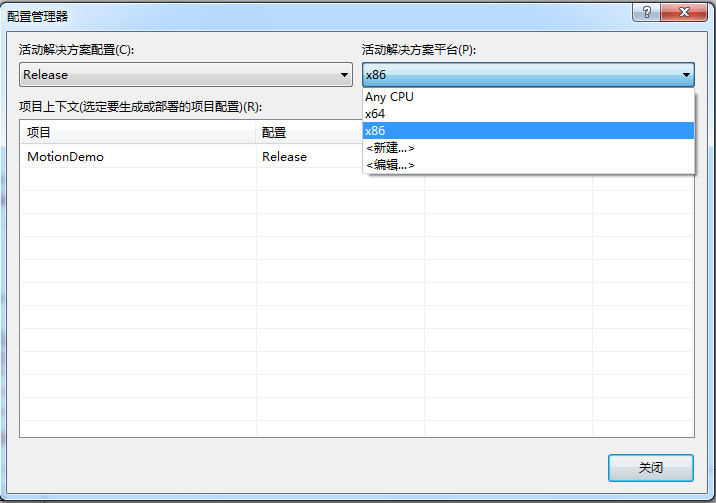
1.3程序配置
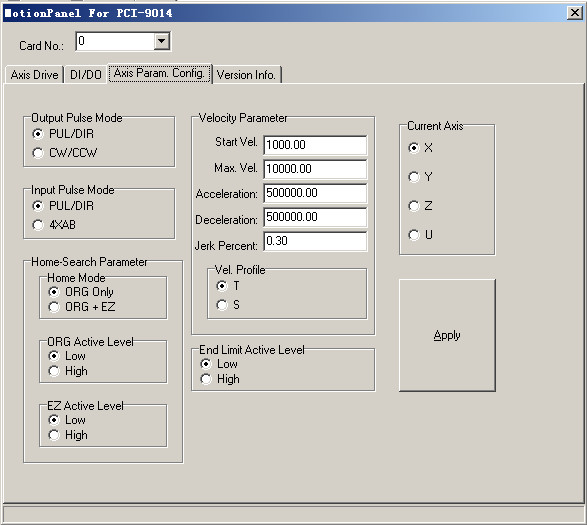
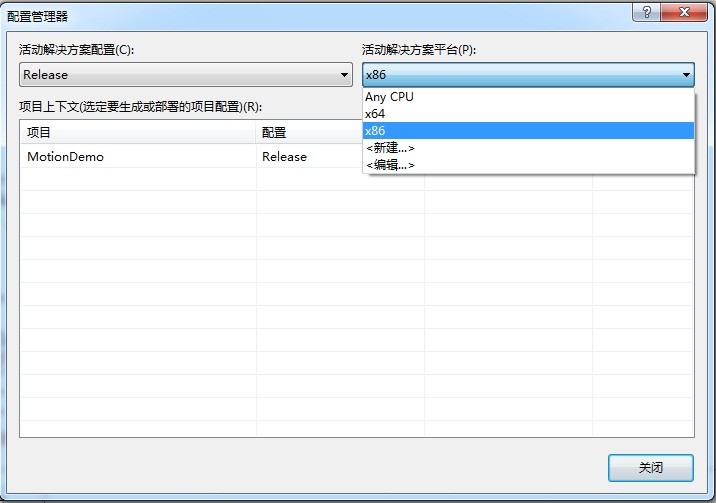
使用.net进行编程时,如果配置管理器(“生成”的菜单下面)里面的设置是Any CPU 时,在程序运行时报错 0x800700B,需要将配置管理器的设置改为与系统配置一致。例如计算机是32位系统,则“活动解决方案平台”下面选择“X86”,如下图所示。如果计算机是64位系统,则选择“X64”
2电机不能正常控制
目前PCI-9014,PCI-9016,PCI-9074都支持多线程函数调用。
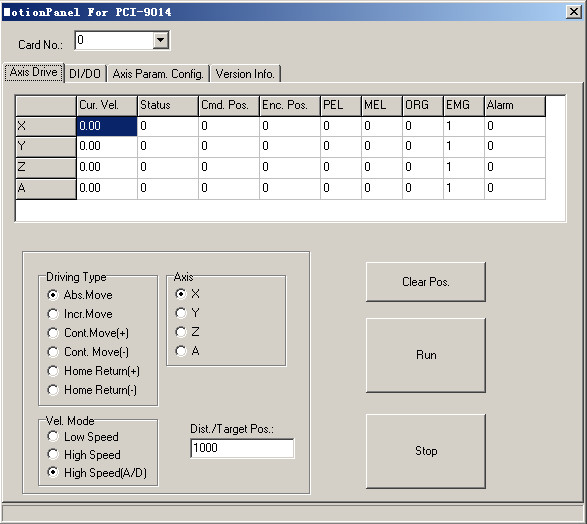
如果是客户自己写的程序不能正常控制的话,请先用自带测试程序motionpanel来做测试。确定motionpanel运行正常后,再使用对应编程语言的范例测试。再查看自己写的程序。
如果程序上有不明白之处,可以直接将部分测试代码邮件至公司邮箱,我们会尽快回复。
2.1电机不动
2.1.1 打开测试软件motionpanel,查看限位或告警,急停是否已经有效。限位,告警显示1为有效,急停显示0为有效。如果硬件限位的有效电平与默认值相反的话,请参考用户手册中的motionpanel的操作说明来反转限位有效电平。程序中调用该函数来反转电平。如果告警或急停有效的话,请检查接线。
2.1.2 查看电机是否已经激磁(使能或者servo on),用手推动轴确定电机是否已经激磁,如果没有的话,检查驱动器的servo on信号是否已经接好,是否有给出激磁信号。
2.1.3 如果电机已经激磁,检查驱动器的控制模式是否正确。升立德的运动控制卡支持的是位置控制模式,请确认驱动器的控制模式与卡一致。
2.1.4 接线不正确
请参考说明书中运动卡对应驱动器的接线,确保有提供24V外部电源
2.1.5 接线不牢固
断电后,检查所有的接插口,用手拉一拉,是否很容易拉掉。保证所有接线插口已接好
2.1.6 如果上述都确定没有问题,且脉冲输出方式是方向+脉冲时,直接用万用表的HZ 档(测频率档),两根表笔分别接到PUL+,PUL-上,使控制轴运行在速度模式下,正常情况下,可以测到脉冲频率与运行速度是一致的。
或者将脉冲线信号端直接接到板卡脉冲反馈信号端。即 PUL+,PUL-,DIR+,DIR-分别对应接到 OA+,OA-,OB+,OB-,如下图所示。然后用motinpanel做测试,脉冲输出格式与脉冲输入格式都设置为PUL/DIR格式。如果发出脉冲与反馈脉冲不一致的话,则表明板卡脉冲发生端出现故障。
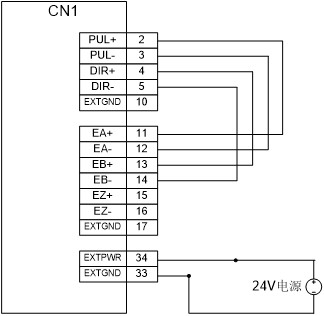
如果测试结果正常,表明板卡工作正常,请检查其他硬件原因
2.2电机出现抖动或者异常振动或者编码器位置持续跳动
2.2.1 如果是控制伺服,请确定驱动器脉冲信号的地或者脉冲反馈信号的地与板卡的信号地已经连接在一起。大部分的运动异常都是由此引起的,请重视。
以松下伺服器接线图为例说明:
松下驱动器X5端口的脉冲信号地 13脚或者编码器反馈信号地 25脚任选其一与板卡的信号地连通
2.2.2 尽量采用带屏蔽的编码器连接线减少电磁干扰
2.2.3 尽量采用差分方式的接线方式,可以有效避免电磁干扰
2.3电机只往一个方向转
接好线的前提下,驱动器的控制方式要与板卡的脉冲输出方式一致。控制卡有两种输出方式PUL/DIR,CW/CCW。确定驱动器中的设置是一样的。
3通用输入输出不正常
3.1输入不正常
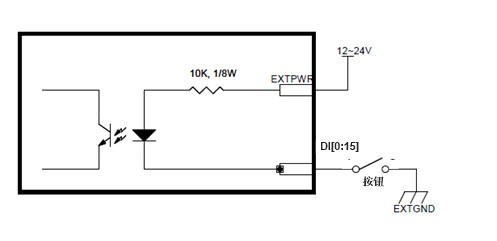
提供外部24V电压的前提下,将按钮接在EICOM和DI两端(运动卡中EICOM与0V已经相连),打开motionpanel,按下按钮,观察DI输入状态是否发生变化,或者用外用表电压档测试EICOM和DI两端的电压值是否发生变化。
3.2输出不正常
输出是集电极开路输出[1],输出有两种状态:导通、截止。不能直接用万用表或电压表测量输出电压。除非在提供外部电压,并连通负载的情况下,才能测到高低电平。运动卡上的输出导通的时候可以测到低电平。
确认负载输入电流大小
DO所驱动设备的电流单路不能超过50 mA,如果驱动电流很大,可以增加驱动板(DIN-8D)。电流过大将损坏输出芯片。
在已经提供24V外部电源的情况下,并且输入正常和负载电流没有超过限制的前提下,将输出端接到输入端,如下图所示。然后用motionpanel做测试,如果输入显示与输出设置值一致的话,则输出输入是正常的。如果不是,则可以确定板卡输出输入故障。
IO卡常见问题处理
1初始化失败或开启测试程序异常
运行程序后弹出提示框“XX Initial fail”,表示卡初始化失败
1.1 硬件驱动安装
首先确定计算机管理中硬件驱动是否有安装好
1、 确定板卡金手指洁净(用橡皮擦清洁金手指),并将卡安装在电脑插槽里,
2、 更新板卡驱动,请参考说明书中安装驱动的方法进行安装。
3、 重新插拔卡,更新板卡驱动
4、 换PCI槽或PCIe槽测试,换卡测试,换电脑测试
5、 如果做完上述尝试,仍然认不到卡的话,请联系业务,将卡发回公司处理。
1.2 管理员权限
如果开启程序出现卡号是非常大的一个数,请考虑是否有获取管理员权限
在使用win7及以上版本的系统时,直接运行.exe可执行程序时,需要鼠标右键点击程序,并选择“以管理员身份运行”,或者用其他方法获得管理员权限后,运行程序的结果才是正常的。
1.3 程序配置

使用.net进行编程时,如果配置管理器(“生成”的菜单下面)里面的设置是Any CPU 时,在程序运行时报错 0x800700B,需要将配置管理器的设置改为与系统配置一致,例如计算机是32位系统,则“活动解决方案平台”下面选择“X86”,如下图所示。如果计算机是64位系统,则选择“X64”
2 通用输入输出不正常
2.1 输入不正常
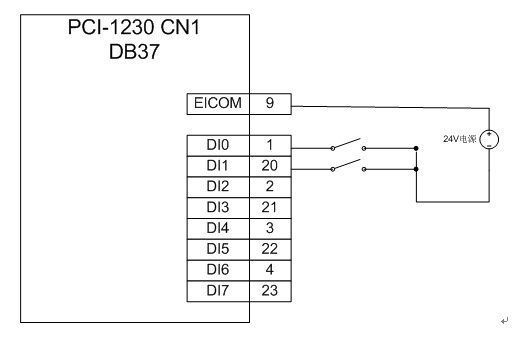
提供外部24V电压的前提下,将按钮接在EICOM和DI两端(注意:IO卡中EICOM与0V或者24V连接都可以,分别对应了低电平有效和高电平有效),打开iopanel,按下按钮,观察DI输入状态是否发生变化,或者用外用表电压档测试EICOM和DI两端的电压值是否发生变化。
下图只示意其中一种接法,图中输入是低电平有效
2.2 输出不正常
输出是集电极开路输出[1],输出有两种状态:导通、截止。不能直接用万用表或电压表测量输出电压。除非在提供外部电压,并连通负载的情况下,才能侧到高低电平。卡的输出导通的时候可以测到低电平。
如果负载接的是感性负载,如继电器或者电磁阀之类的,VCOM需要接至负载电源的24P
确认负载输入电流大小
DO所驱动设备的电流单路不能超过50 mA,如果驱动电流很大,可以增加驱动板(DIN-8D)。电流过大将损坏输出芯片。
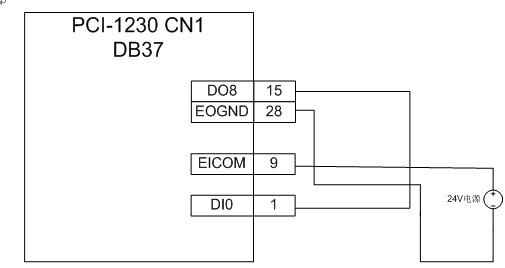
在已经提供24V外部电源的情况下,并且输入正常和负载电流没有超过限制的前提下,将输出端接到输入端,如下图所示。然后用iopanel做测试,如果输入显示与输出设置值一致的话,则输出输入是正常的。如果不是,则可以确定板卡输出输入故障。
[1] 集电极开路,http://en.wikipedia.org/wiki/Open_collector
1 新手入门
1.1 插卡
打开包装,拿出PCI板卡,如下图:
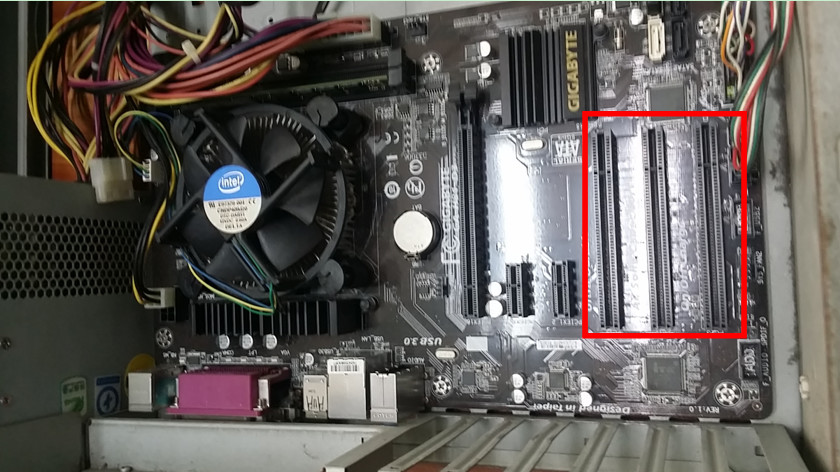
打开电脑机箱盖,找到PCI插槽,如下图(红色框部分是PCI槽,有些主板上PCI槽是白色或其他颜色):
插入板卡,如下图:

并拧好螺丝。如果有多张同种板卡,需要拨拨码开关的,请先拨号,再插入电脑PCI插槽中,
1.2 驱动安装
插上卡后,正常情况下,计算机设备管理器下面会有一个问号提示,具体说明请参见运动卡使用说明书中的具体步骤。
1.3 运动部分接线
注意:板卡中所有相同命名的引脚都是通的,不需要再另外用线缆短接起来。同样名称的引脚接其中一个就可以了。
例如:EXTPWR——24V正
EXTGND——24V负
运动控制部分接线图,请参见运动卡使用说明书或者升立德官网www.solidtech.cn中“服务支持”中的“常见问题”的接线图说明,目前包含的接线图有:台达A2系列,B2系列,松下,安川,三菱的。
限位,原点,请使用三线制传感器,其中两根供电,信号线接入板卡的PEL,MEL,ORG
1.4 IO接线
9016的DI号是从3开始的,函数编程调用也是从3开始。
输入:PCI-9014的DI,限位,原点,报警,急停都是低电平有效。
PCI-1230/1232 的输入可以接成低有效,也可以接成高有效。
PCI-9014 DI接线:
按钮,一根线接 DI,一根接 EXTGND。
PCI-1230/2332 DO接线(以低电平有效为例):
EICOM——24V正
按钮的两端,一根线接 24V负,一根线接 DI
输出:PCI-9014,PCI-1230/1232的DO是集电极开路输出,不带负载的时候量电压是不正确的。
继电器接线:
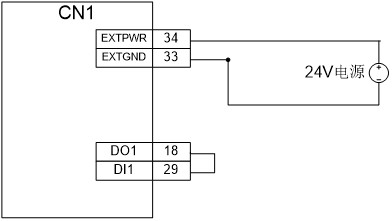
PCI-9014 DO接线:
EXTPWR——24V正
EXTGND——24V负
继电器两根线,一根线接 24V正,另一根线接DO
PCI-1230/2332 DO接线:
VCOM——24V正
EOGND——24V负
继电器两根线,一根线接 24V正,另一根线接DO
2 主要问题
2.1 开不了机,认不到卡
断电后拔卡,用干净的橡皮擦擦拭金手指,再重新插卡,装驱动,测试。
2.2 驱动安装不了
首先确定板卡的型号是否对应。
然后确定驱动的版本为最新版。
如果仍然有问题,请注意安装安装版的系统,我们不保证所有ghost系统下驱动都能正常安装
2.3 初始化报错
卡号问题,使用IO卡时,默认的卡号是0或者15,如果iopanel初始化报错,请检查卡号设置
权限问题,使用WIN7系统时,如果电脑之前安装过旧驱动,再换新驱动后,仍然需要使用管理员权限开启motionpanel或者VS。
如果是新电脑第一次装新版驱动就不会存在这个问题。
2.4 轴不动
第一次就不动,还是之前有正常动过。如果之前正常动过,是更改了那些部件。如果什么都没有改过,突然不动了,就检查所有接线。很有可能是接头处松动了。如果第一次就不动,也是先查接线,然后查参数设置等。
2.5 轴不停
建议分长,中,短路程,分别对应不同参数
2.6 回零问题
没有自动回零功能。需要客户自己写回零过程。第一次往某一个限位走,第二次用回零函数。回零速度是设置速度函数中的起始速度。
2.7 撞机或误动作
我司运动卡不支持电脑睡眠功能,使用前,请关闭电脑睡眠功能。
9014,9016,1230/1232,9064,9074支持多线程调用,9024不支持,需要客户自己写程序规避。
2.8 程序问题
205报错,是限位,急停,报警有效了。打开motionpanel,正常情况下,所有的轴信号显示都是0,除了EMG,显示1正常。否则是有效状态。
9014初始化函数中的卡号排列是根据PCI插槽顺序排列的,没有经过排序。如果程序中不排序的话,请注意对应轴关系。
首先使用motionpanel测试基本功能,或者程序代码的类似功能。如果基本功能有问题,请对照使用说明书排查问题。
如果motionpanel无法重现问题,请使用带有记录功能的dll文件。
